1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
|
public:
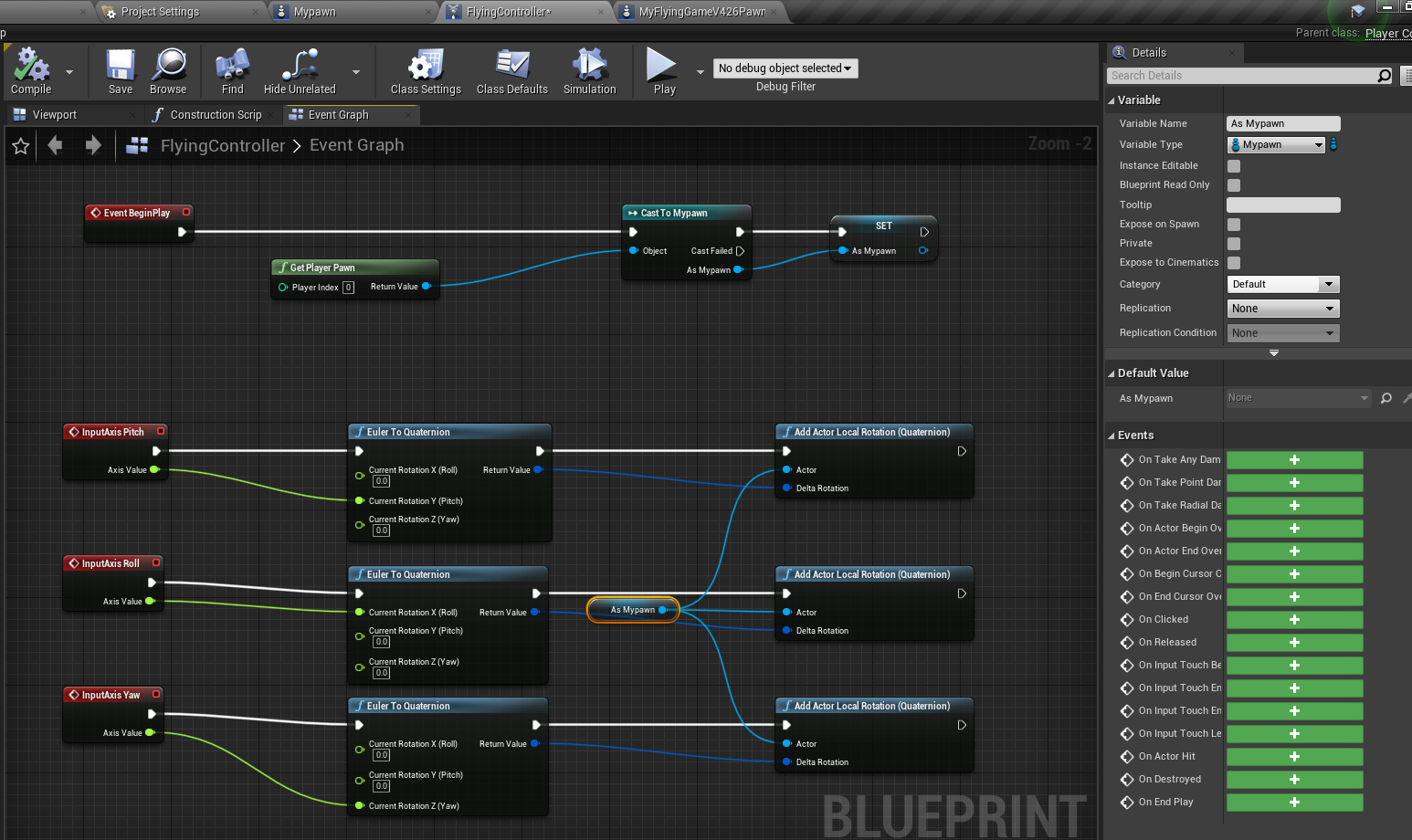
// 旋转公式:将欧拉角的度数转换为四元数
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Euler To Quaternion", Keywords = "rotation, quaterion"), Category = "Quaternion Rotation")
static FQuat Euler_To_Quaternion(FRotator Current_Rotation);
// 根据输入的四元数设置组件的世界坐标的旋转
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Set World Rotation (Quaterion)", Keywords = "rotation, quaternion"), Category = "Quaternion Rotation")
static void SetWorldRotationQuat(USceneComponent* SceneComponent, const FQuat& Desired_Rotation);
// 根据输入的四元数设置组件的相对旋转
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Set Relative Rotation (Quaterion)", Keywords = "rotation, quaternion"), Category = "Quaternion Rotation")
static void SetRelativeRotationQuat(USceneComponent* SceneComponent, const FQuat& Desired_Rotation);
// 添加本地旋转量
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Add Local Rotation (Quaterion)", Keywords = "rotation, quaternion"), Category = "Quaternion Rotation")
static void AddLocalRotationQuat(USceneComponent* SceneComponent, const FQuat& Delta_Rotation);
// 根据输入的四元数设置Actor的世界坐标的旋转
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Set Actor World Rotation (Quaternion)", Keywords = "rotation, quaternion"), Category = "Quaternion Rotation")
static void SetActorWorldRotationQuat(AActor* Actor, const FQuat& Desired_Rotation);
//根据输入的四元数设置Actor的相对旋转
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Set Actor Relative Rotation (Quaternion)", Keywords = "rotation, quaternion"), Category = "Quaternion Rotation")
static void SetActorRelativeRotationQuat(AActor* Actor, const FQuat& Desired_Rotation);
// 添加本地旋转量
UFUNCTION(BlueprintCallable, meta = (DisplayName = "Add Actor Local Rotation (Quaternion)", Keywords = "rotation, quaternion"), Category = "Quaternion Rotation")
static void AddActorLocalRotationQuat(AActor* Actor, const FQuat& Delta_Rotation);
FQuat UQuaternoinsBPLibrary::Euler_To_Quaternion(FRotator Current_Rotation)
{
//声明输出四元数
FQuat q;
//将度数转换为弧度
float yaw = Current_Rotation.Yaw * PI / 180;
float roll = Current_Rotation.Roll * PI / 180;
float pitch = Current_Rotation.Pitch * PI / 180;
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
q.W = cy * cr * cp + sy * sr * sp;
q.X = cy * sr * cp - sy * cr * sp;
q.Y = cy * cr * sp + sy * sr * cp;
q.Z = sy * cr * cp - cy * sr * sp;
return q;
}
void UQuaternoinsBPLibrary::SetWorldRotationQuat(USceneComponent* SceneComponent, const FQuat& Desired_Rotation)
{
if (SceneComponent)
{
SceneComponent->SetWorldRotation(Desired_Rotation);
}
}
void UQuaternoinsBPLibrary::SetRelativeRotationQuat(USceneComponent* SceneComponent, const FQuat& Desired_Rotation)
{
if (SceneComponent)
{
SceneComponent->SetRelativeRotation(Desired_Rotation);
}
}
void UQuaternoinsBPLibrary::AddLocalRotationQuat(USceneComponent* SceneComponent, const FQuat& Delta_Rotation)
{
if (SceneComponent)
{
SceneComponent->AddLocalRotation(Delta_Rotation);
}
}
void UQuaternoinsBPLibrary::SetActorWorldRotationQuat(AActor* Actor, const FQuat& Desired_Rotation)
{
if (Actor)
{
Actor->SetActorRotation(Desired_Rotation);
}
}
void UQuaternoinsBPLibrary::SetActorRelativeRotationQuat(AActor* Actor, const FQuat& Desired_Rotation)
{
if (Actor)
{
Actor->SetActorRelativeRotation(Desired_Rotation);
}
}
void UQuaternoinsBPLibrary::AddActorLocalRotationQuat(AActor* Actor, const FQuat& Delta_Rotation)
{
if (Actor)
{
Actor->AddActorLocalRotation(Delta_Rotation);
}
}
|